


アジア最大級の食品製造総合展「FOOMA JAPAN 2022 (国際食品工業展)」が2022年6月7日(火)〜10日(金)の4日間、東京都江東区の東京ビッグサイト東展示棟で開かれました。食品業界は医薬品、化粧品と並んで自動化への期待が高い「三品業界」の一つ。弊社も開発に参画した惣菜盛付ロボットシステムも出品されると聞いて、会場を訪ねてみました。
コンパクトになったDelibot

惣菜盛付ロボットシステムは「Delibot」(デリボット)と名付けられ、開発の中心となったコネクテッドロボティクスのブースで展示されていました。お披露目の記者会見の際と比べると少しコンパクトになっているのがわかるでしょうか。記者会見時はトレーを自動的に送り出す装置がついていて、コンベアの位置や向きも少し変わっていました。今回はトレーは手動で送り出すこととし、コンベアの位置なども調整することで省スペース化を実現したということです。

会場では40分〜1時間おきぐらいにデモで実演。盛付ロボットはテレビニュースなどでも紹介されたからか、多くの来場者が訪れ、関心の高さを感じさせました。
進化する協働ロボット

デンソーウェーブのブースでは、話題の協働ロボット「COBOTTA PRO」が冷凍フライをフライヤーに投入する作業のデモ実演をしていました。
番重にばら積みされた冷凍コロッケをカメラで認識し、アームロボットがコンベア上に並べます。自動フライヤーとコンベアが連動していて、コンベア上のコロッケをフライヤーに投入していく仕組み。
協働ロボットは、安全柵なしで人と並んで作業ができるという点で便利なロボットですが、安全性を優先するために動きが遅く、生産現場からは「生産性を落としたくない」との声が出ていたといいます。そこでCOBOTTA PROは「高速・高精度」をうたい文句とし、人が近くにいない時は最大秒速2.5メートルまで速く動けるうえ、位置繰り返し精度も±0.04ミリという精度を実現させて、安全性と処理能力を両立させているとのことです。
体積で計量する盛り付けシステム

食品機械のアルトリストのブースでは、「桝計量式盛り付けシステム」が展示されていました。
機械による盛り付けの計量は多くの場合、重さが基準となりがちで、ロボットは重量センサーを使って食品の量を決めることが少なくありません。でも、うどんにかける薬味のネギやサラダにトッピングで付けるコーンなどごく少量のものは、重さではなく計量スプーンや容器などの「○杯分」と体積で計るのが普通です。そのため人手作業が中心で自動化しにくいという難点がありました。
今回のシステムはハンドの先に窪みがついており、その窪みがいっぱいになる体積分だけ刻みネギを取り分けることによって、体積での計量を実現しました。とはいえ、刻みネギやコーン、豆のような「バラ物」「粒物」を通常の真空吸着ハンドで吸引すると、エアの配管が目詰まりを起こしたり、ハンドの窪みの中に食材が残ってしまったりしがちです。そこで今回のシステムでは「ベルヌーイ」という原理を利用した特殊な仕組みを採用しています。
ベルヌーイとは、空気や水などの流体が勢いよく流れた際に、流体周辺の圧力が低くなることで周囲の物質を引き付ける現象のこと。ワークにハンドを押し付け、吸着面のノズルからエアを放射状に勢いよく噴射すると、中心部の気圧が下がってワークを引き付けるので、窪みの体積分だけ持ち上げることができるというわけです。
ロボットの可能性広げる安価な触覚センサ
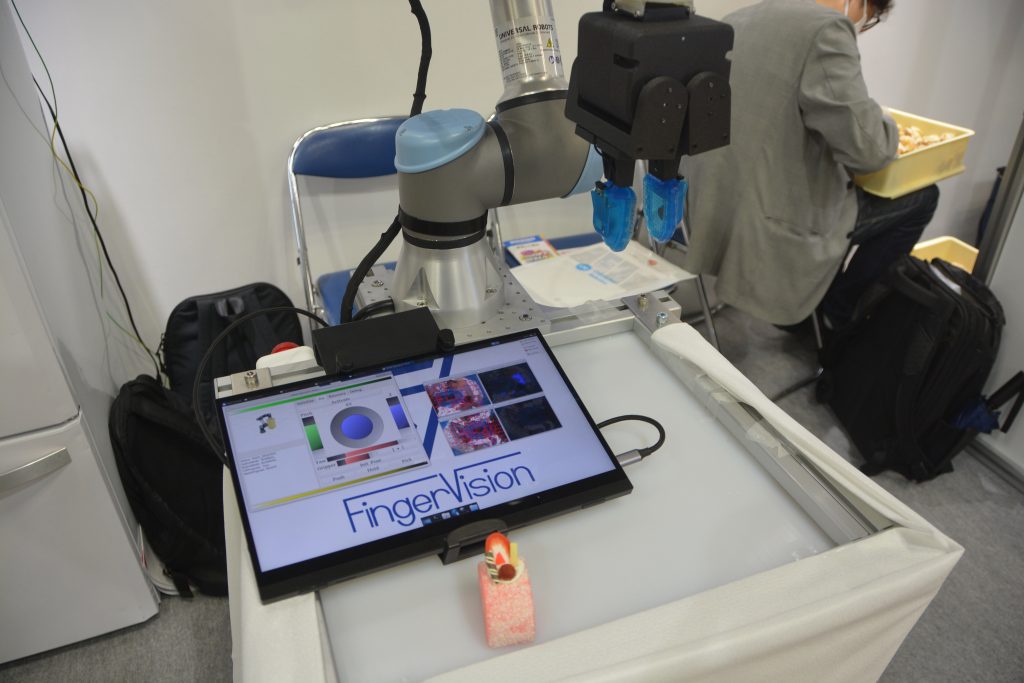
ロボットベンチャーのFingerVision(フィンガービジョン)のブースでは安価に導入できる触覚センサが展示されていました。
卵や生花など、力加減が難しいワークを扱う時に威力を発揮するのが触覚センサです。しかし、多くの場合触覚センサは繊細で壊れやすかったり配線が大掛かりになったりするため、導入のハードルが高くなってしまいます。そこで、その弱点を補えるアイデアの一つが今回のセンサです。
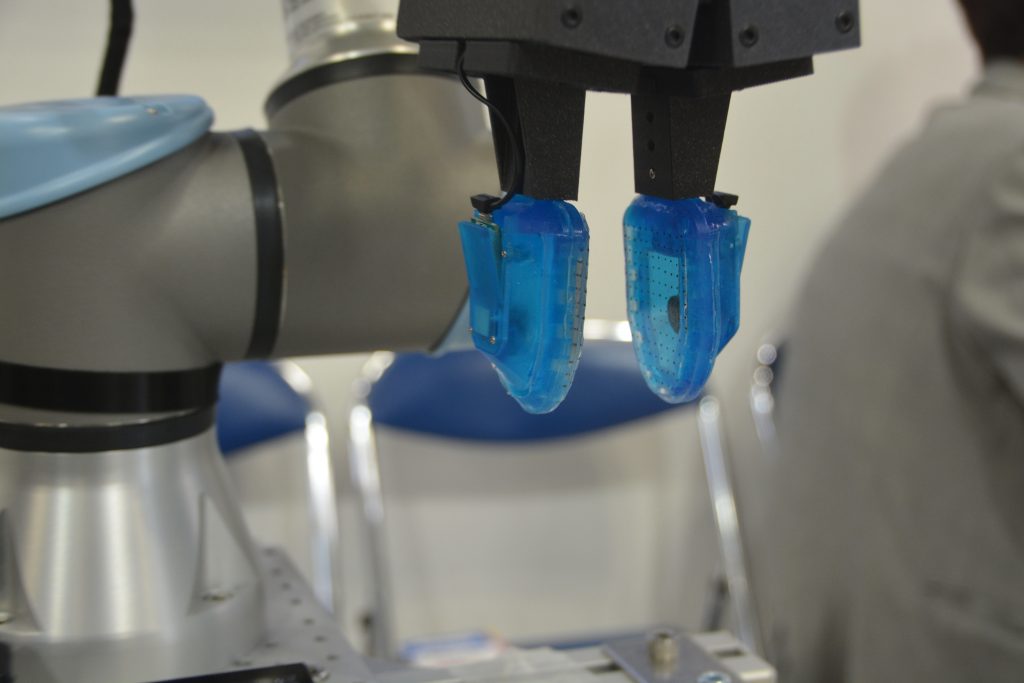
構造は驚くほど単純。ハンドの爪の中に小さなカメラが仕込まれており、ワークと接する部分には等間隔でドットが並ぶ透明のシリコン製シートが張られています。このシートがワークと接した際に、ドットがどちらの方向にどれぐらい動くかをカメラを通して測定することで、ハンドにかかる力の大きさや滑りの分布などを捉えることができるという仕組みです。ハードではなくソフトの力で触覚センサを実現したと言えるでしょう。赤外線カメラを仕込めば、ワークの温度を測ることも可能です。
食品産業で扱う多くの食材は、柔らかいだけでなく形が一定でないものも多いため、傷つけずかつ失敗せずに安定してワークをつかむのに触覚センサは威力を発揮します。FingerVisionの触覚センサは構造が単純で、手ごろな価格に設定できそうなのも大きな魅力です。触覚センサの導入が進めば、これまで自動化が難しいとされていた作業にもロボットを使うことができるようになるかもしれません。
初代FOOMAアワード最優秀賞の食肉処理システム

FOOMAは今回、優れた研究開発の成果を顕彰する「FOOMAアワード」を創設しました。第1回の最優秀賞に選ばれたのは、前川製作所の「セルダスシステム」。三つのロボットハンドを組み合わせ、深層学習技術によってさまざまな種類の骨付き肉の特徴を認識して骨を自動で取り除くシステムです。会場のガレリア(通路)に設けられた特設スペースには、受賞を伝える大きなパネルが展示されていました。
上記写真の処理で骨を抜くのに必要な時間は骨付き肉1本当たり約40秒と通常の職人並みの速さを実現。プログラムを切り替えることで豚のかた、うで、もも、ロース、ばらなど、あらゆる部位に対応できるようになるとのことです。受賞もあって多くの来場者が訪れていました。
人並みの手際の良さでレタスの芯除去

社会課題を解決するためにAIとロボットを組み合わせた装置を開発しているROBIT(ロビット)のブースで展示されていたのは、AIを使って食品など不定形物を自動でカット加工する装置「CUTR」(カトル)です。
デモで見せていたのは、レタスの芯除去の作業。AIがレタスの外観から芯の位置や姿勢を推定してロボットの動きを決めており、除去率も設定できるそうです。食品の加工ではレタス以外にもキャベツやトマト、パイナップルなど、食べられない芯の部分を取り除く工程が必要となるケースが少なくありません。しかし、個体差が大きいため機械的に一律に切り取る方法だと無駄に切り捨ててしまう部分が増えてしまうため、人手に頼る場合が多いのが実情です。一方で野菜は朝出荷するために作業は夜間になるうえ、作業場の気温も低温なのが普通です。作業者にとっては過酷な環境のため、自動化が望まれていました。AI技術を使うことで、人並みの歩留まりを実現させ、AIの学習も少数のサンプルで効率的に進めることが可能だとのことです。
レールのいらないリニアのコンベヤ
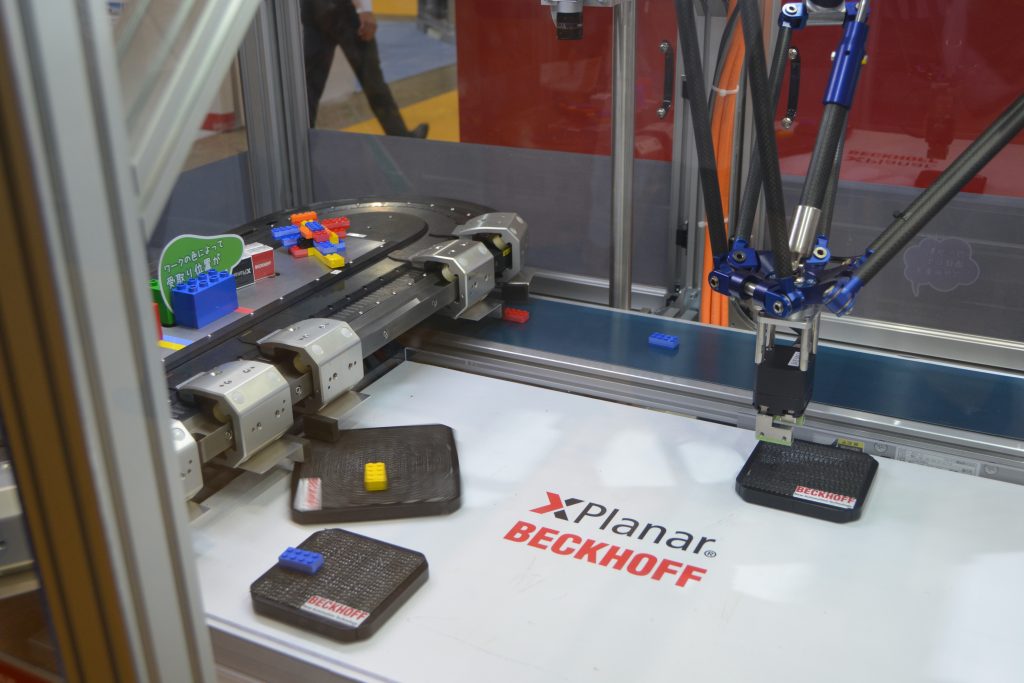
オートメーション機器メーカーのベッコフオートメーションのブースでは、ガイドレスの浮遊搬送システム「XPlanar」(エックスプラナー)がデモを繰り返していました。
XPlanarはトレー状の搬送機「ムーバー」を磁気で浮上させ、自在に動かすことができるシステム。リニアモーターカーと同じ仕組みで、横から見るとムーバーがわずかに浮いているのを確認することができます。
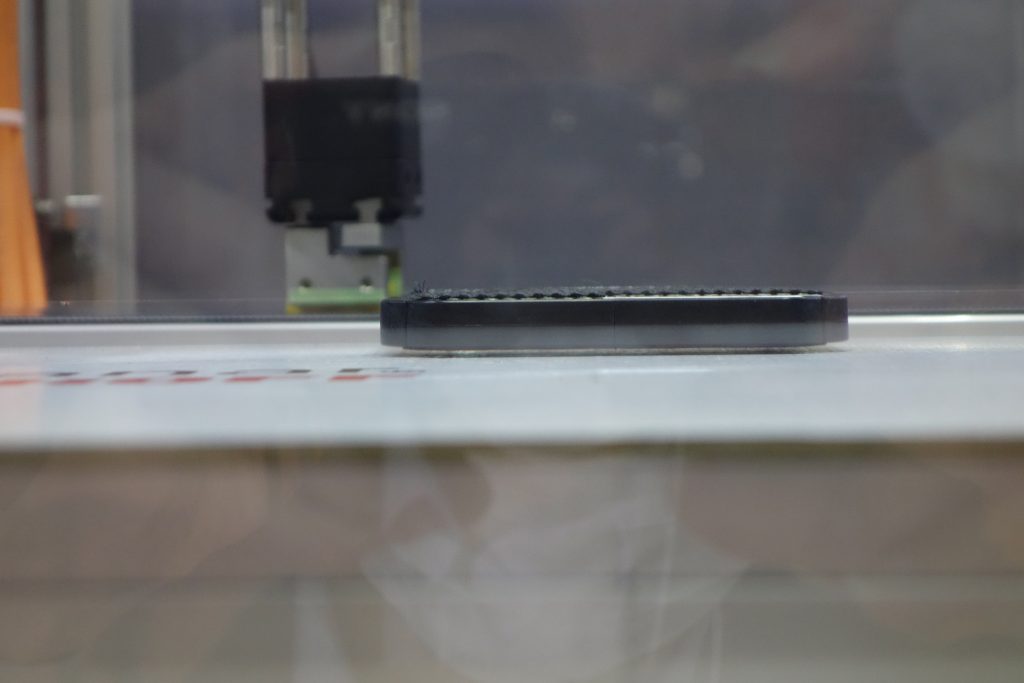
床面にはコイルがぎっしり埋まっており、ムーバーはシリアルナンバーで管理していて、パソコンで個別に動きを制御することが可能。先行するワークを追い越したりその場でぐるぐる回転したりと、従来のコンベヤではできなかった動きをさせることも自由自在です。コンベヤのレイアウトに縛られることなくワークを搬送することができるという点では画期的なシステムと言えそうです。
新エフエイコムへようこそ!
【投稿者・お問い合わせ】
新エフエイコム株式会社 ライター 竹花 周
E-mail: s.takehana@s-facom.jp




